[Sim2Real Paper 5] Agile and Dynamic Motor Skills
Hwangbo et al.의 Learning agile and dynamic motor skills for legged robots를 통해 ANYmal 실기체 transfer에서 actuator net과 hybrid simulator의 역할을 정리한다.
Hwangbo et al.의 Learning agile and dynamic motor skills for legged robots를 통해 ANYmal 실기체 transfer에서 actuator net과 hybrid simulator의 역할을 정리한다.
Tan et al.의 Sim-to-Real: Learning Agile Locomotion For Quadruped Robots를 통해 quadruped Sim2Real의 actuator model, latency, system identification, randomization을 정리한다.
Peng et al.의 Sim-to-Real Transfer of Robotic Control with Dynamics Randomization을 통해 물리 파라미터 randomization의 기본 아이디어를 정리한다.
Tobin et al.의 Domain Randomization 논문을 통해 real world를 simulation variation 중 하나로 보이게 만드는 Sim2Real 아이디어를 정리한다.
Jakobi et al.의 Noise and The Reality Gap을 통해 Sim2Real에서 reality gap이 왜 생기고, simulation noise가 어떤 역할을 하는지 정리한다.
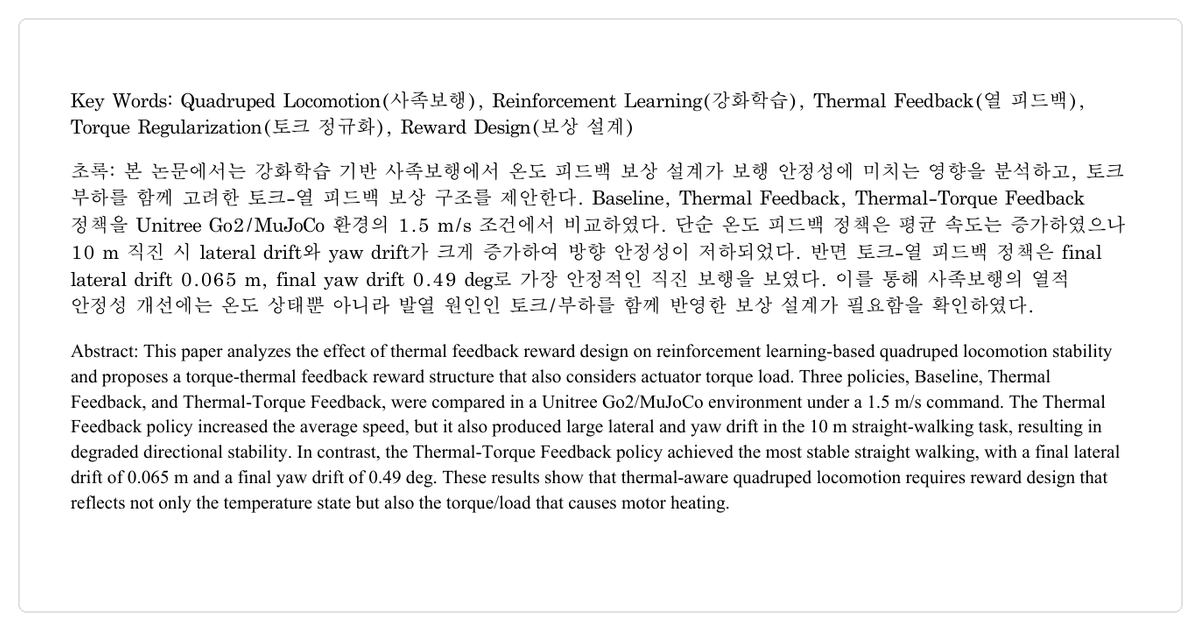
Unitree Go2 종합설계를 마무리하며 thermal reward, torque/load 관점, 실제 로봇 실험에서 느낀 문제 정의의 중요성, 그리고 다음 연구 방향을 정리한다.
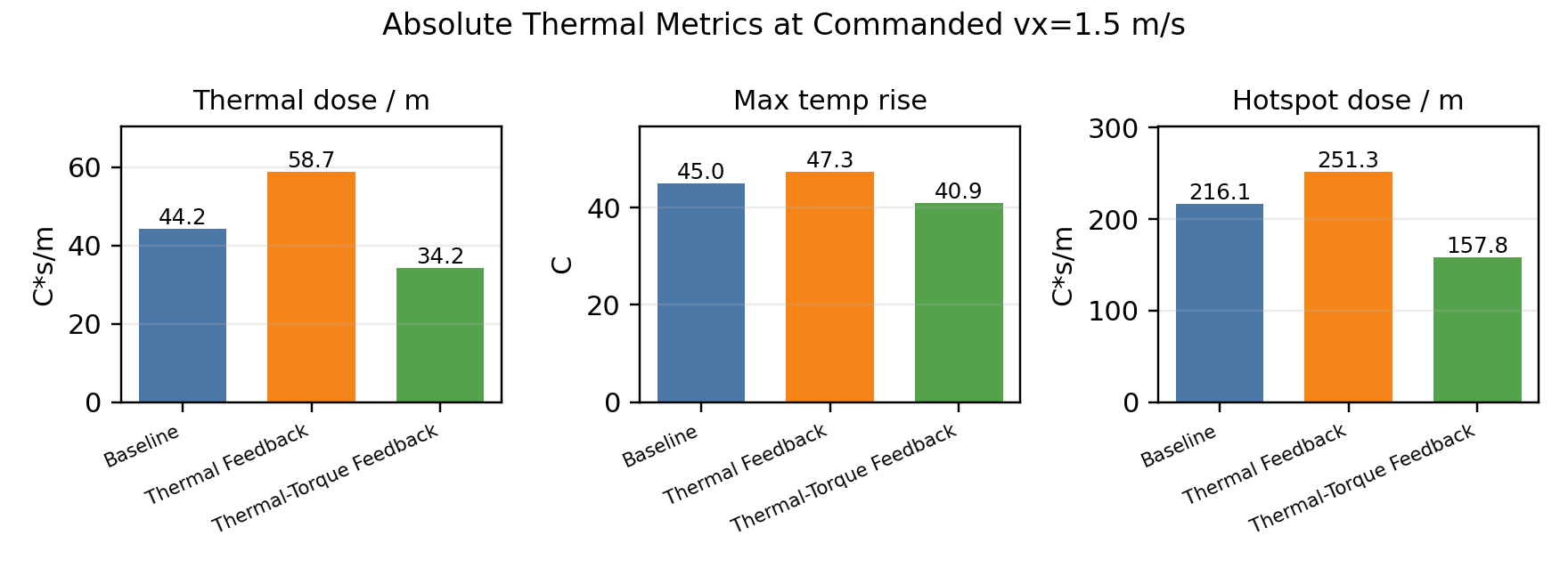
Unitree Go2 thermal-only reward가 왜 기대와 다르게 동작했는지 ablation으로 분석하고, torque와 positive power를 reward에 직접 묶어야 했던 이유를 정리한다.
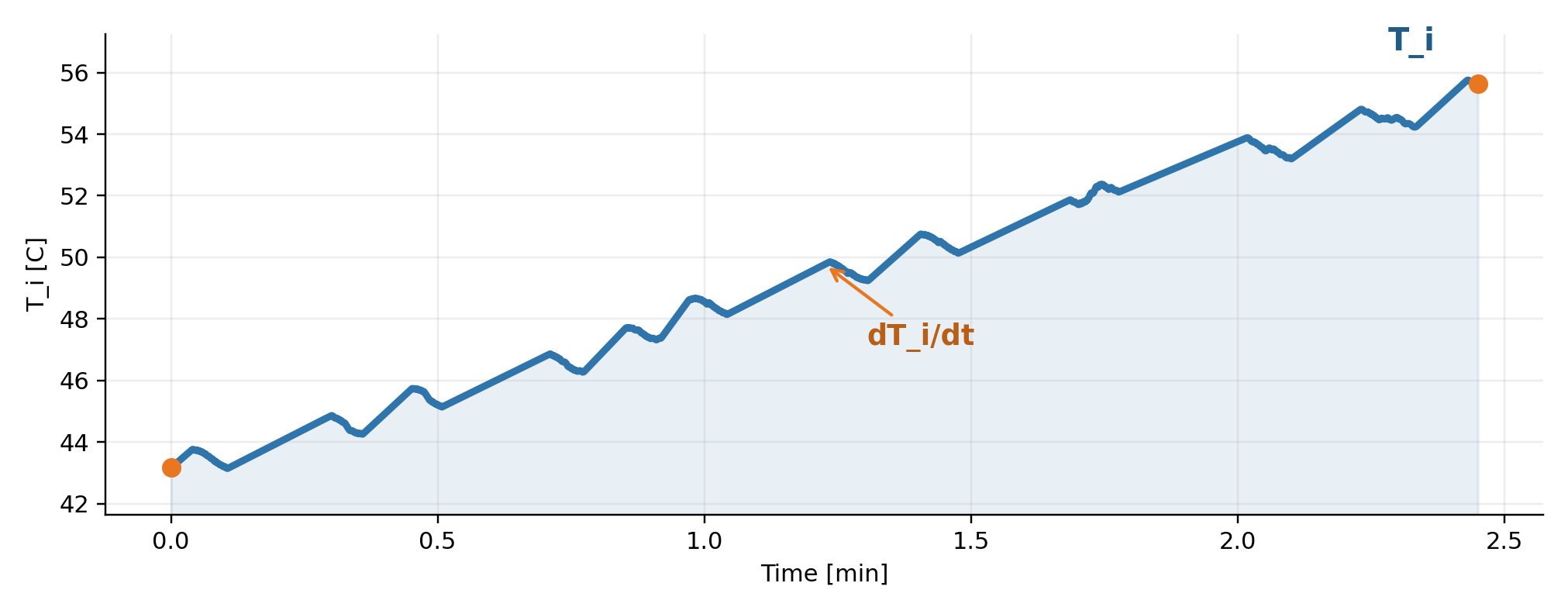
Unitree Go2 lowstate 로그에서 reported actuator temperature를 보고, 온도 자체가 아니라 load 기반 temperature-rate proxy를 thermal-aware reinforcement learning reward로 연결한 과정을 정리한다.

Unitree Go2 논문 실험을 위해 baseline 보행 policy의 reported actuator temperature, 전류, torque, joint state 데이터를 수집하고 thermal-aware regulator 비교 기준을 정리한다.
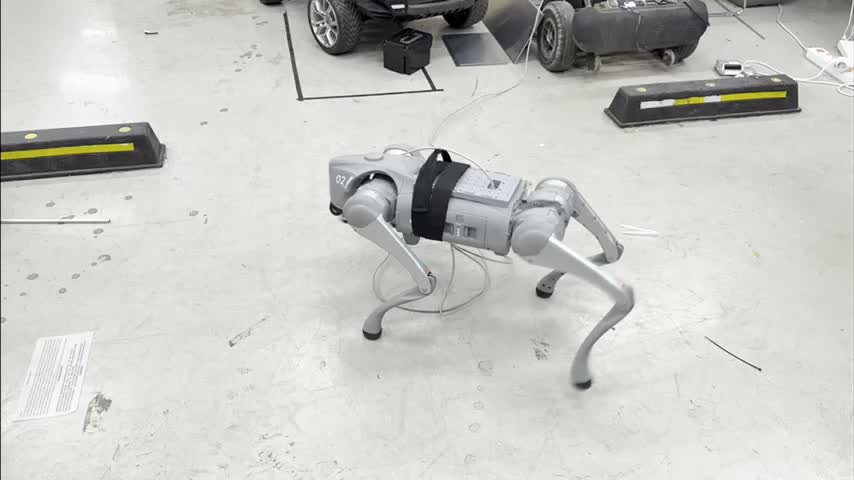
Unitree Go2에 강화학습 policy를 실제 deploy하여 보행에 성공한 과정과 Domain Randomization, deploy 정합성을 정리한다.