[Linear Algebra] 3Blue1Brown 선형대수학의 본질 정리
3Blue1Brown의 선형대수학의 본질 시리즈를 바탕으로 벡터, 선형결합, 기저, 행렬, 행렬곱, determinant, 역행렬, 내적, 외적, 고유값, 고유벡터, 추상 벡터공간을 시각적 관점에서 정리한다.
3Blue1Brown의 선형대수학의 본질 시리즈를 바탕으로 벡터, 선형결합, 기저, 행렬, 행렬곱, determinant, 역행렬, 내적, 외적, 고유값, 고유벡터, 추상 벡터공간을 시각적 관점에서 정리한다.
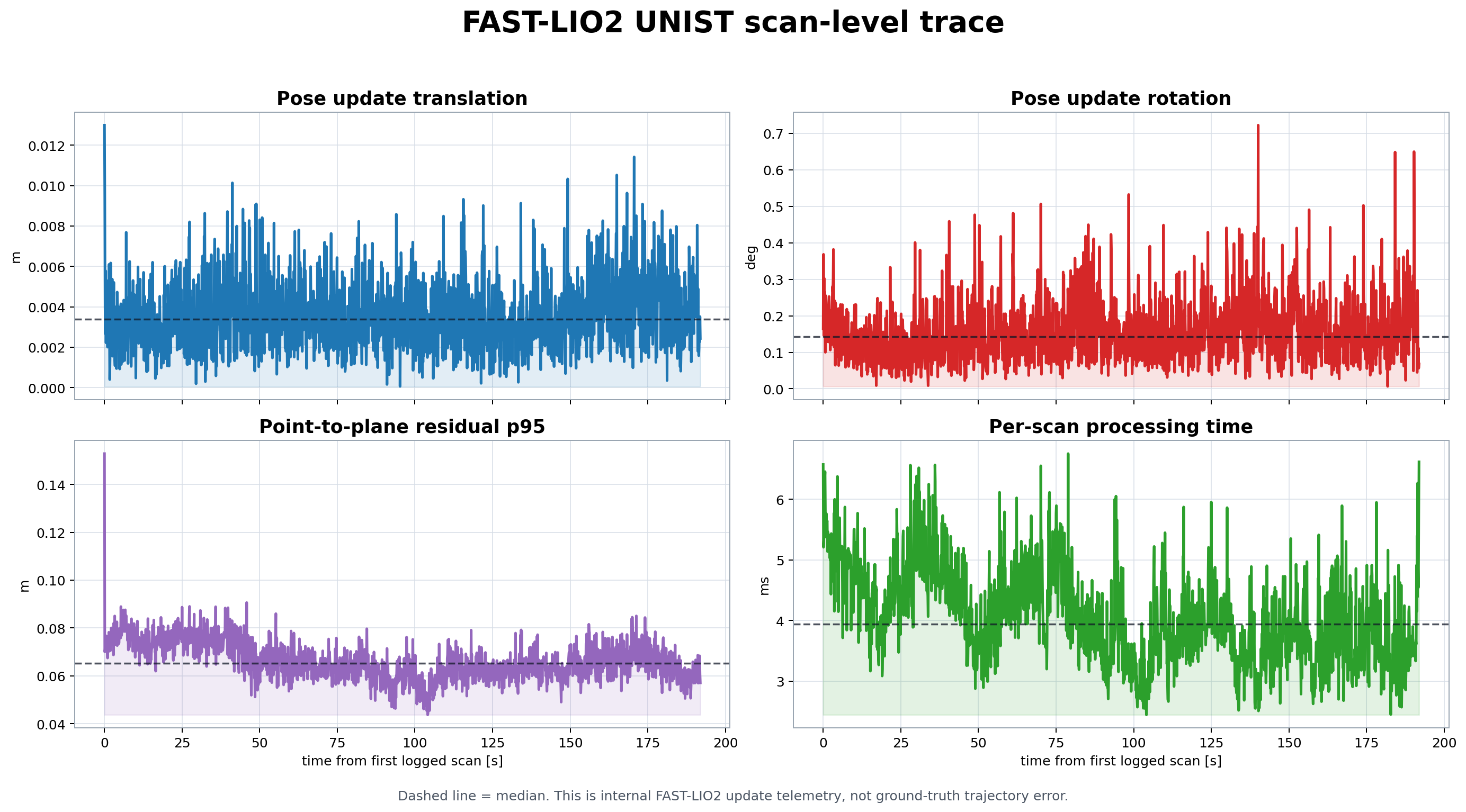
SLAM 공부 6주차에 LIO 내부에서 IMU propagation, scan pose prediction, deskew, point-to-map residual, state update, map insertion, odometry output이 어떻게 연결되는지 정리한다.
SLAM 공부 5주차에 fixed map 기준 scan registration, point-to-plane residual, correspondence, inlier ratio, geometry degeneracy, UNIST fixed-map residual evaluator 결과를 정리한다.
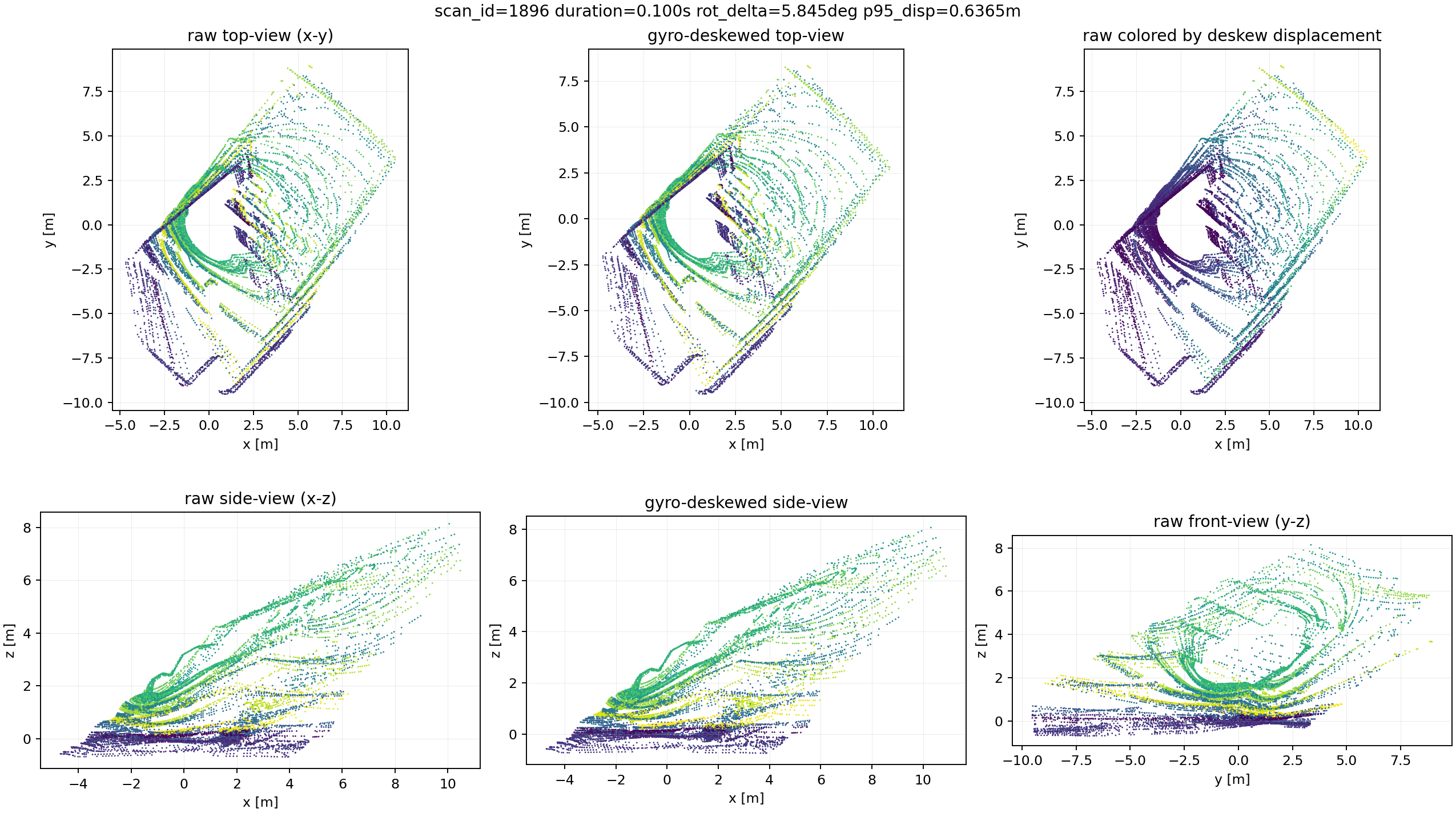
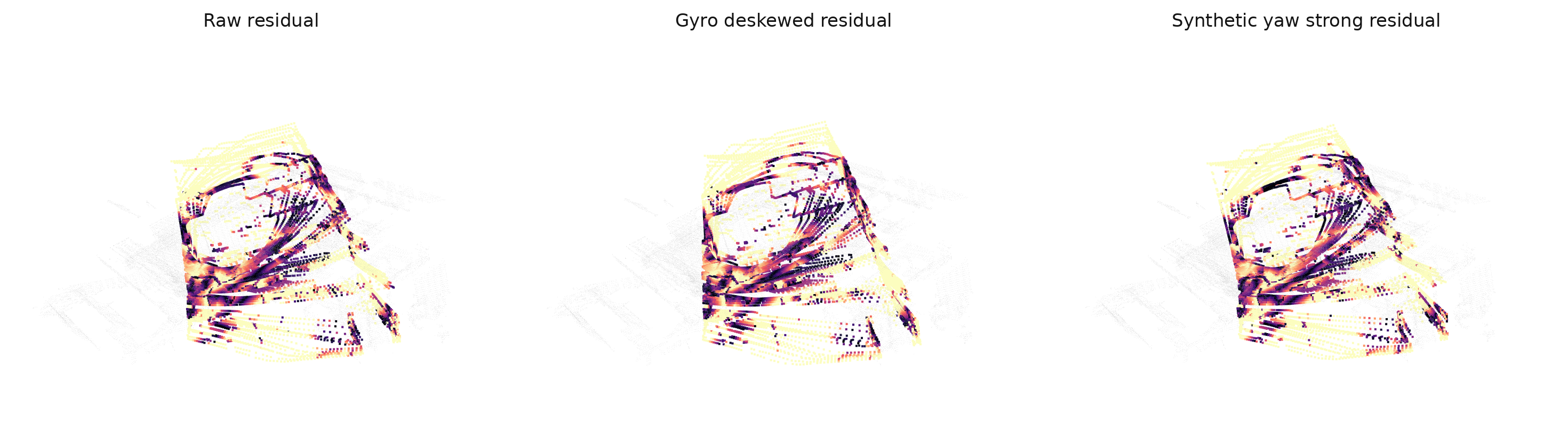
SLAM 공부 4주차에 실제 rosbag에서 UNIST Livox gyro-integrated rotation deskew를 메인 시각화로 보고, Go2 LowState estimated SE(3) deskew를 연구 연결용 보조 근거로 정리한다.
SLAM 공부 3주차에 LiDAR scan distortion, deskew 기본식, synthetic re-skew, exact deskew, constant-velocity deskew, deskew error 해석을 정리한다.
SLAM 공부 2주차에 LiDAR scan, packet, point별 timestamp, ring/channel, point ordering, LiDAR-IMU clock, jitter, packet loss, lidar_time_auditor 구현 흐름과 실제 rosbag audit 결과를 정리한다.
SLAM 공부 1주차에 좌표계 frame, transform composition, relative pose, rotation log, interpolation, frame_motion_analyzer 구현 흐름을 정리한다.
Rudin et al.의 Learning to Walk in Minutes를 통해 Isaac Gym과 legged gym 계열의 massively parallel RL locomotion 학습 흐름을 정리한다.
Kumar et al.의 RMA 논문을 통해 terrain, payload, actuator 상태 변화에 online으로 적응하는 Sim2Real locomotion 구조를 정리한다.
Lee et al.의 Learning Quadrupedal Locomotion over Challenging Terrain을 통해 rough terrain에서 proprioception 기반 zero-shot transfer를 정리한다.