Isaac Sim Tutorial 2. ROS2 Cameras
Isaac Sim의 TurtleBot에 카메라를 붙이고 ROS2 image topic으로 publish한 뒤 RViz2에서 확인하는 흐름을 정리한다.
이 글은 이전 TurtleBot ROS2 연결 글에서 만든 TurtleBot stage를 이어서 사용합니다. 이번 목표는 TurtleBot에 카메라를 추가하고, Isaac Sim camera view를 ROS2 image topic으로 publish한 뒤 RViz2에서 확인하는 것입니다.
핵심은 카메라 prim 자체보다도 camera prim이 render product가 되고, 그 render product가 ROS2 Camera Helper를 통해 image topic으로 나가는 흐름을 이해하는 것입니다.
참고한 자료는 아래와 같습니다.
1. TurtleBot에 카메라 추가
먼저 이전 글에서 import한 TurtleBot의 body 아래에 camera1, camera2 prim을 만듭니다. 중요한 점은 카메라를 로봇의 움직임을 따라가는 prim 아래에 넣어야 한다는 것입니다.
URDF import 후 namespace가 붙은 경우에는 보통 a__namespace_base_footprint처럼 이름이 붙은 base prim 아래에 카메라를 추가합니다. 이렇게 해야 로봇이 움직일 때 카메라 frame도 같이 따라갑니다.
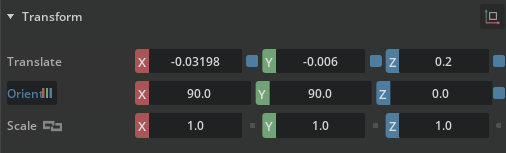
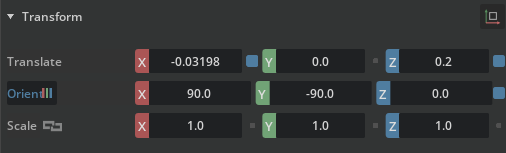
두 카메라의 transform은 로봇 기준 앞뒤를 바라보도록 잡습니다. 한쪽은 전방, 다른 한쪽은 후방을 보게 만들면 ROS2 topic이 정상적으로 분리되는지 확인하기 쉽습니다.
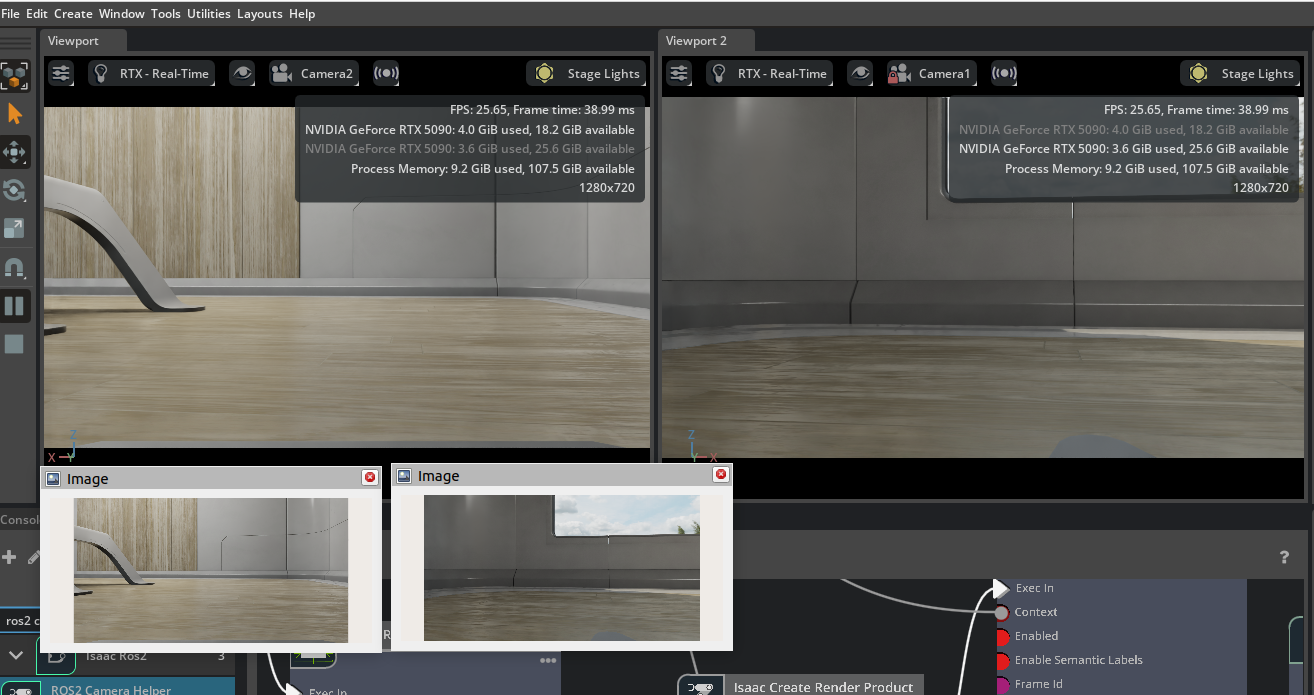
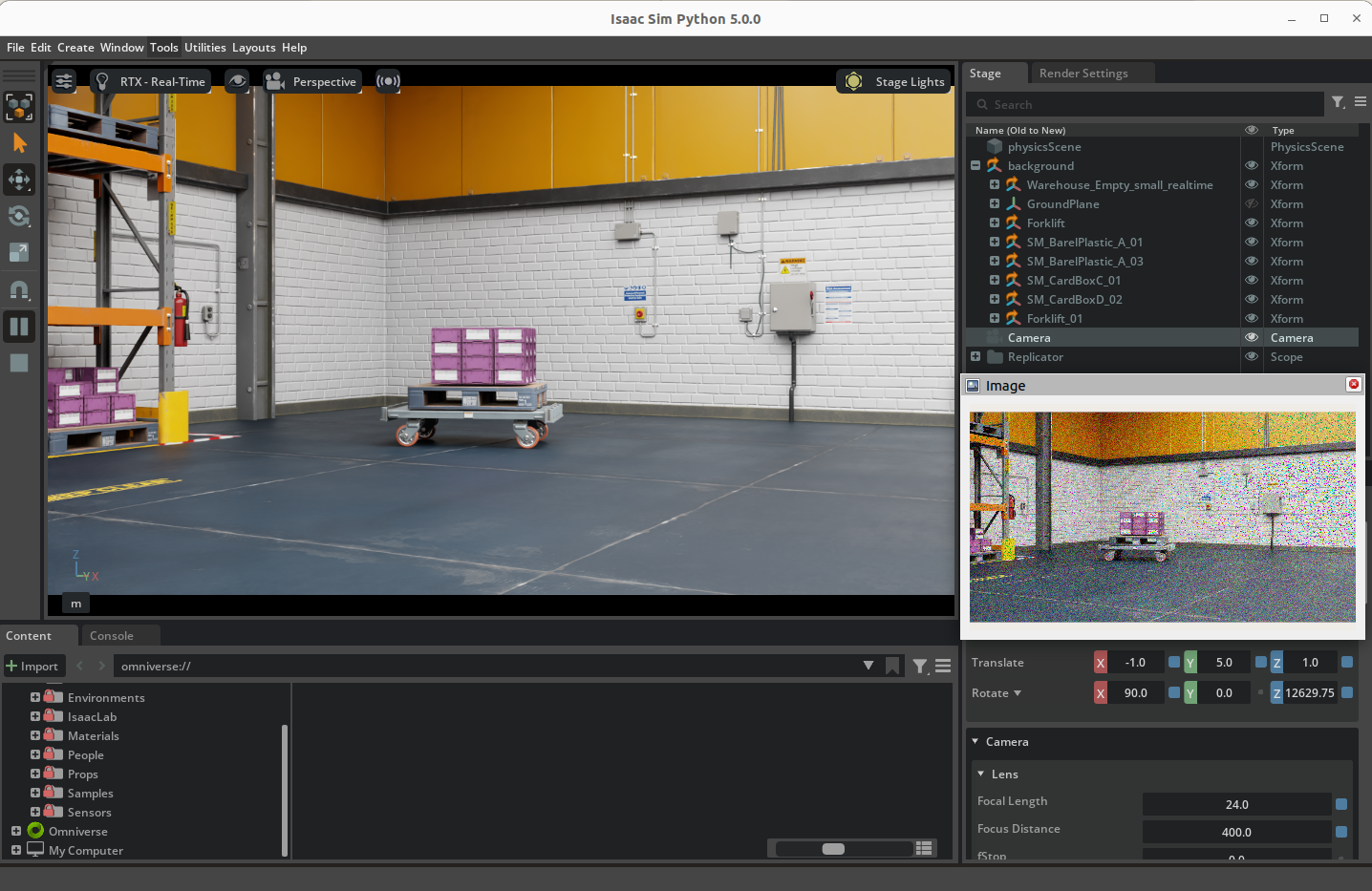
카메라가 제대로 붙었는지는 viewport를 하나 더 띄워 확인할 수 있습니다. Window > Viewport로 보조 viewport를 만들고, 하나는 perspective view, 다른 하나는 camera view로 두면 stage와 camera 시야를 동시에 볼 수 있습니다.
또는 Tools > Sensors > Camera Inspector를 열면 scene 안에 있는 카메라들을 한 번에 확인할 수 있습니다.
2. ROS2 Camera OmniGraph 만들기
이제 시뮬레이션 카메라 이미지를 ROS2 topic으로 내보냅니다. Isaac Sim에는 camera용 ROS2 OmniGraph shortcut이 있어서, 처음부터 모든 노드를 수동으로 만들지 않아도 됩니다.
메뉴에서 아래 경로를 사용합니다.
1
Tools > Robotics > ROS 2 OmniGraphs > Camera
ROS2 graph가 보이지 않는다면 ROS2 bridge extension이 켜져 있는지 먼저 확인합니다.
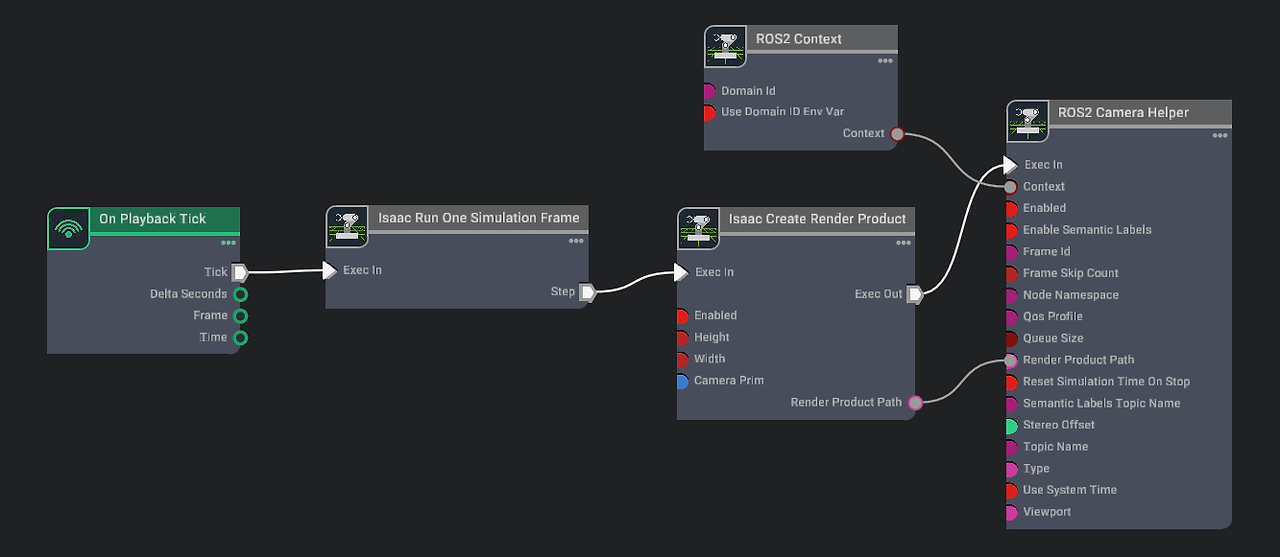
핵심 흐름은 다음과 같습니다.
1
2
3
4
Camera prim
-> Isaac Create Render Product
-> ROS2 Camera Helper
-> ROS2 image topic
Isaac Create Render Product 노드의 target은 방금 추가한 camera prim으로 잡습니다. 이후 ROS2 Camera Helper 노드에서 topic name과 message type을 설정합니다.
여기서 render product는 Isaac Sim 내부 camera output을 ROS2 helper가 사용할 수 있는 형태로 만들어주는 중간 단계라고 보면 됩니다. 그래서 카메라 topic이 나오지 않을 때는 camera prim target, render product 연결, helper의 topic 설정을 차례대로 확인하는 것이 좋습니다.
3. RViz2에서 카메라 Topic 확인
Isaac Sim stage를 play한 뒤 host 터미널에서 ROS2 환경을 source하고 topic 목록을 확인합니다.
1
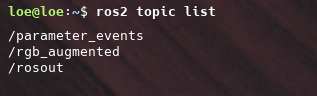
ros2 topic list
카메라 graph가 정상이라면 설정한 image topic이 topic list에 나타납니다. RViz2에서 Image display를 추가하고 해당 topic을 선택하면 Isaac Sim camera image를 볼 수 있습니다.
카메라가 두 개라면 같은 구조의 graph를 하나 더 만들고 topic name을 분리하면 됩니다. 예를 들어 camera1, camera2에 대해 각각 render product와 ROS2 Camera Helper를 만들면 앞뒤 카메라를 따로 받을 수 있습니다.
이 방식은 이후 depth image나 camera info를 추가할 때도 그대로 확장됩니다. sensor prim을 만들고, render product를 만들고, ROS2 helper가 원하는 message type으로 publish하는 패턴입니다.
4. Camera Noise 예제
Isaac Sim에는 카메라 이미지에 noise나 augmentation을 넣어 publish하는 예제도 있습니다. Isaac Sim ROS2 환경이 source되어 있고 rclpy를 load할 수 있는 터미널에서 아래 예제를 실행합니다.
1
2
cd ~/isaacsim
./python.sh standalone_examples/api/isaacsim.ros2.bridge/camera_noise.py
실행 중 script warning이 뜨면 ROS2 bridge, workspace source, ROS_DOMAIN_ID를 먼저 확인합니다.
예제가 정상적으로 실행되면 /rgb_augmented 같은 topic이 생성됩니다.
host 쪽 ROS2 workspace도 source한 뒤 RViz2에서 augmented image topic을 선택합니다.
그러면 noise가 들어간 카메라 이미지를 RViz2에서 확인할 수 있습니다.
이 예제는 실제 카메라 연결 과정과는 조금 별개지만, Isaac Sim에서 생성한 image stream을 ROS2로 publish하고 RViz2에서 확인하는 구조를 다시 한 번 확인하기 좋습니다.
5. 정리하며
이번 글의 핵심은 camera prim을 만든 뒤, 그 출력을 ROS2 image topic으로 내보내는 연결 구조입니다.
1
2
3
4
Camera prim
-> Render Product
-> ROS2 Camera Helper
-> RViz2 Image display
이 구조를 잡아두면 이후 depth image, camera info, lidar, TF tree까지 같은 패턴으로 확장할 수 있습니다. 특히 여러 센서를 붙일 때는 prim target과 topic name을 명확히 분리해두는 것이 중요합니다.