Isaac Sim Tutorial 4. TF Trees and Odometry
Isaac Sim에서 TurtleBot의 TF tree와 odometry를 ROS2로 publish하고 RViz2에서 확인하는 흐름을 정리한다.
이 글은 TurtleBot ROS2 연결, ROS2 Cameras, RTX Lidar Sensors에 이어서 TurtleBot의 TF tree와 odometry를 ROS2로 publish하는 과정을 정리합니다.
앞선 글에서 camera와 Lidar data를 ROS2 topic으로 내보냈습니다. 이번 글의 목표는 그 sensor data가 로봇의 어느 위치에 붙어 있는지 TF tree로 설명하고, odom -> base_link 변환과 /odom topic을 RViz2에서 확인하는 것입니다.
참고한 자료는 아래와 같습니다.
1. Camera TF Publisher 추가
이전 회차에서 TurtleBot에 카메라 두 대를 붙여두었다고 가정합니다. 이번에는 OmniGraph에서 ROS2 Publish Transform Tree 노드를 추가해 camera frame을 ROS2 TF로 내보냅니다.
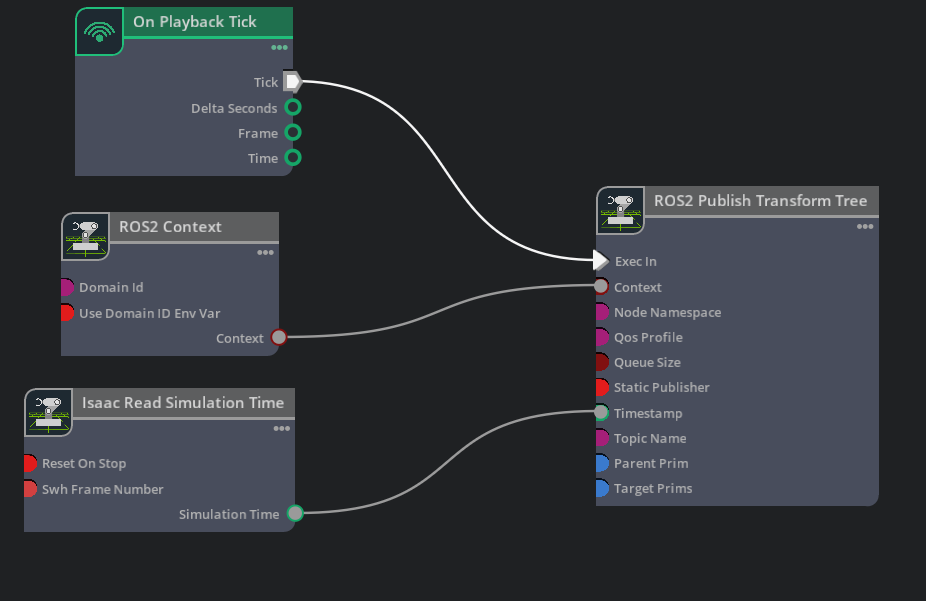
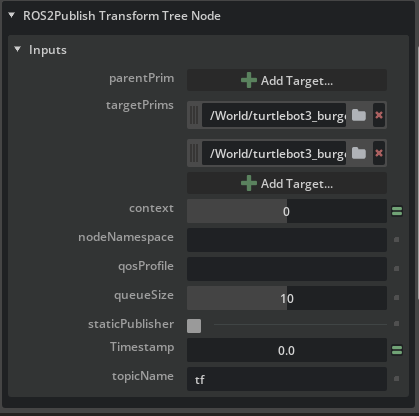
ROS2 Publish Transform Tree는 ROS2 Context와 연결하고, simulation timestamp를 입력해 TF message가 Isaac Sim 시간 기준으로 publish되도록 합니다. target prim에는 이전 글에서 만든 camera prim 두 개를 넣습니다.
stage를 play하면 외부 ROS2 환경에서 TF를 확인할 수 있습니다. 이때 robot 전체의 articulation root를 함께 넣고 parent prim을 base_footprint로 설정하면 camera와 wheel frame이 robot base 아래에 묶입니다.
여기서 핵심은 sensor topic과 sensor frame을 따로 생각하지 않는 것입니다. RViz2에서 image나 lidar data를 robot 위에 올바르게 표시하려면, topic뿐 아니라 그 topic의 frame도 TF tree에 포함되어 있어야 합니다.
2. Odometry 세팅
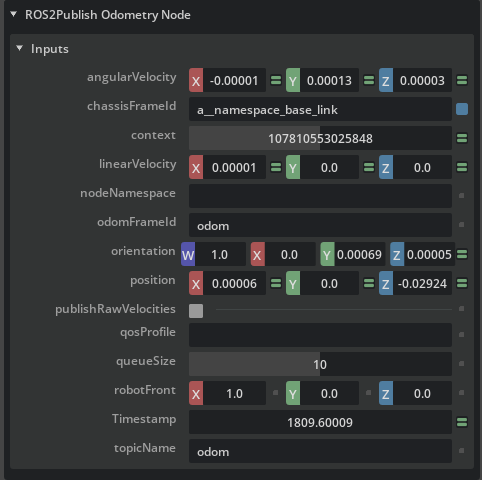
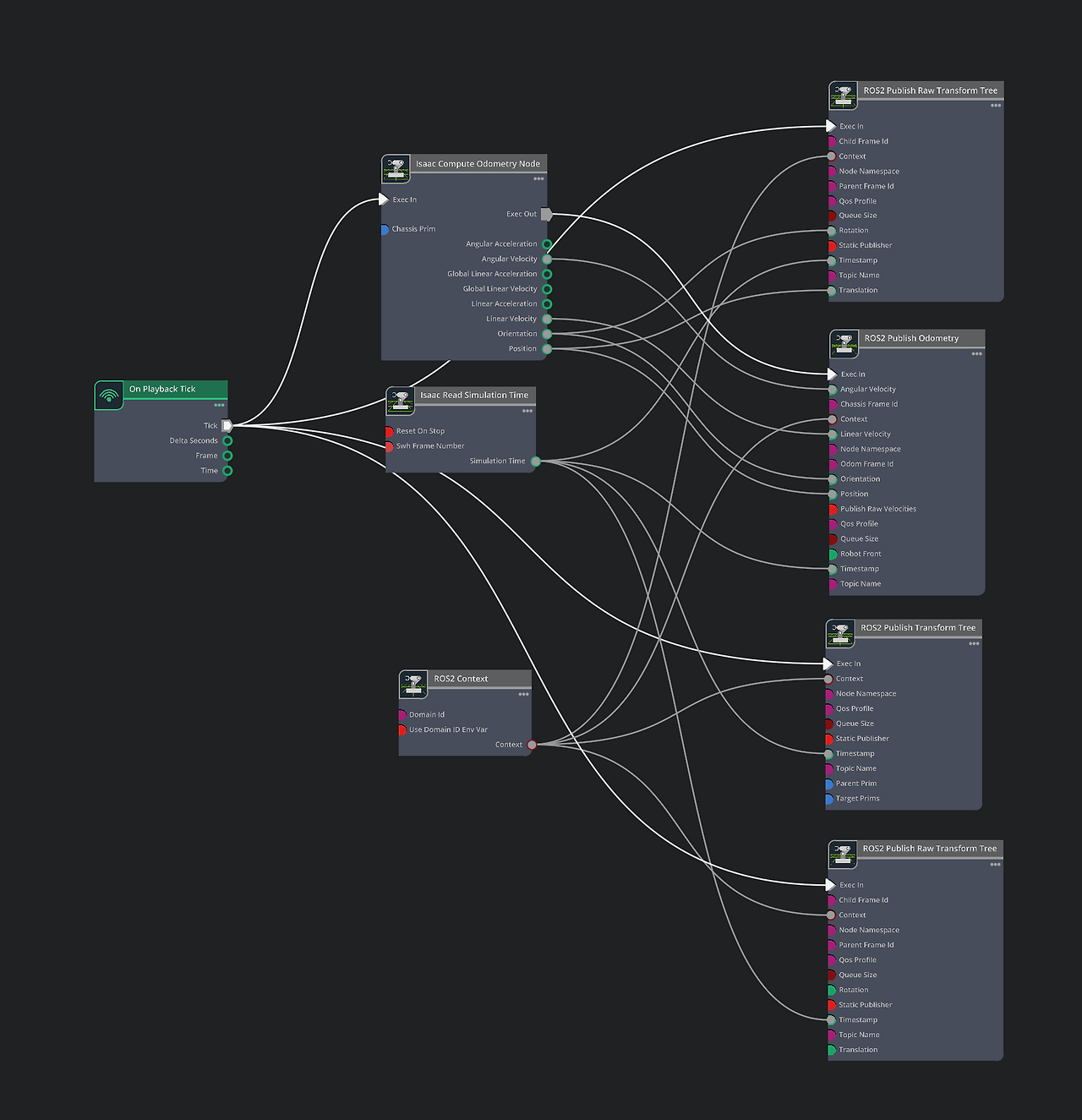
다음은 odom -> base_link 관계를 만드는 graph입니다. odometry는 robot의 이동량을 계산해서 /odom topic으로 publish하고, 동시에 TF tree에서 odom frame과 robot base frame 사이의 transform을 만들어줍니다.

Isaac Compute Odometry 노드의 chassis target에는 TurtleBot root prim을 지정합니다. 이후 ROS2 Publish Odometry는 계산된 odometry를 ROS2 message로 publish하고, ROS2 Publish Raw Transform Tree는 odom과 base_link 사이의 TF를 publish합니다.
여기서 raw transform tree는 scene 안의 실제 prim만 다루는 것이 아니라, odom처럼 의미론적으로 필요한 frame을 만들 때 사용합니다. 즉, Isaac Sim stage 구조와 ROS2 TF 구조가 항상 1:1로만 대응하는 것은 아닙니다.
3. Robot Base 아래 TF 묶기
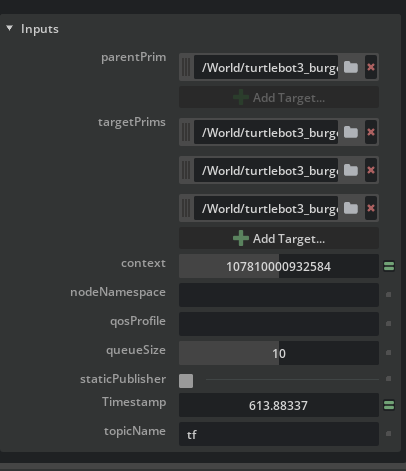
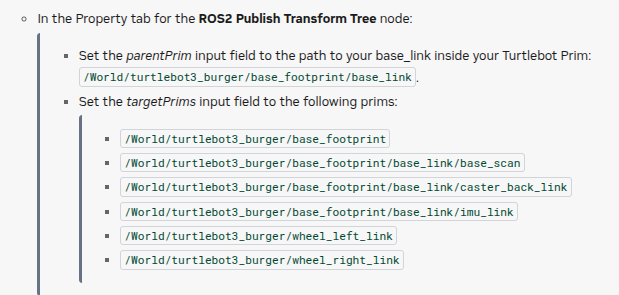
robot 중심을 base_link 또는 base_footprint로 보고, 그 아래에 Lidar, camera, IMU, wheel link를 target prim으로 넣습니다. 이렇게 하면 sensor data가 RViz2에서 robot base 기준으로 정렬됩니다.
ROS2 Publish Transform Tree를 하나 더 추가하고 parent prim에는 robot base frame에 해당하는 prim을, target prim에는 센서와 wheel link들을 넣습니다.
이 단계는 나중에 sensor가 늘어날수록 중요해집니다. camera, lidar, imu, wheel frame이 모두 robot base 아래에 정리되어 있어야 RViz2에서 하나의 robot으로 보입니다.
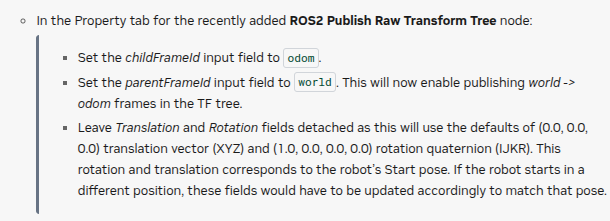
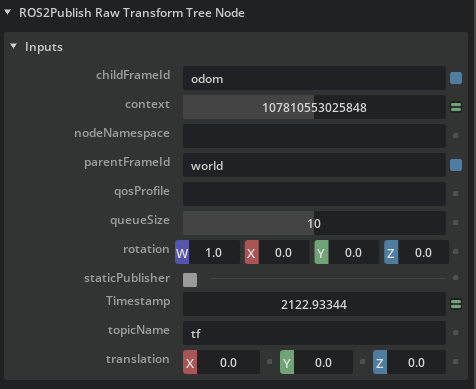
4. World와 Odom 연결
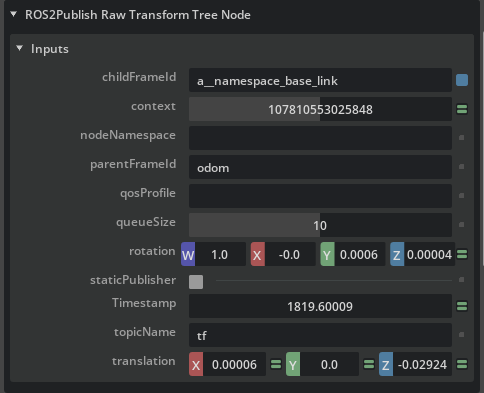
마지막으로 world -> odom 관계를 만듭니다. ROS2 Publish Raw Transform Tree를 추가하고 orientation과 translation을 아래처럼 둡니다.
1
2
orientation: (1, 0, 0, 0)
translation: (0, 0, 0)
이렇게 두면 robot이 처음 시작하는 위치가 world 원점과 맞춰집니다.
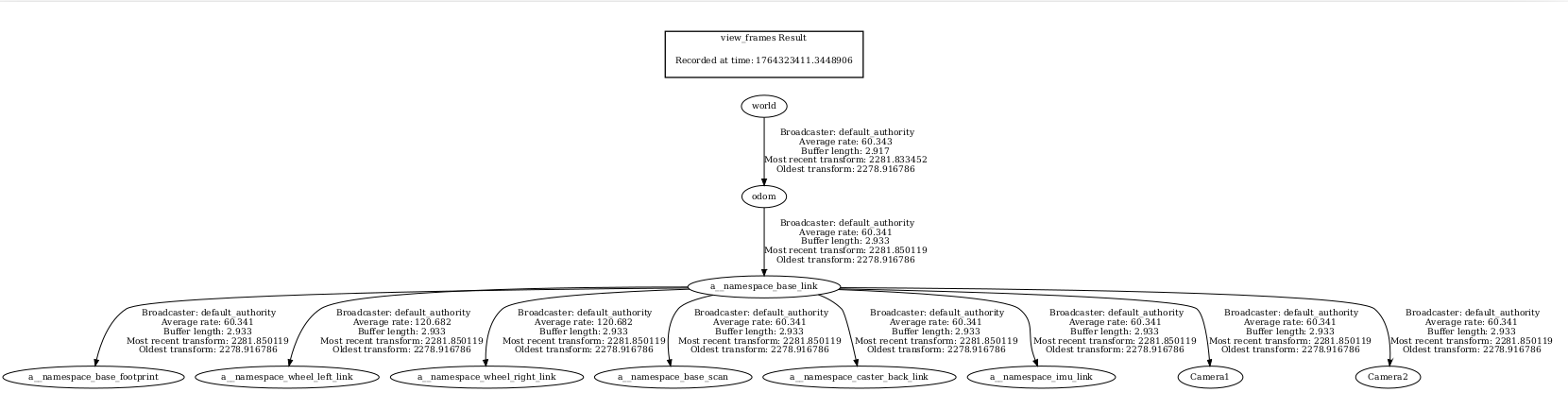
전체 TF 구조를 큰 그림으로 보면 world가 가장 바깥 기준이고, 그 아래에 odom, robot base, sensor frame들이 차례로 연결됩니다.
5. RViz2에서 TF 확인
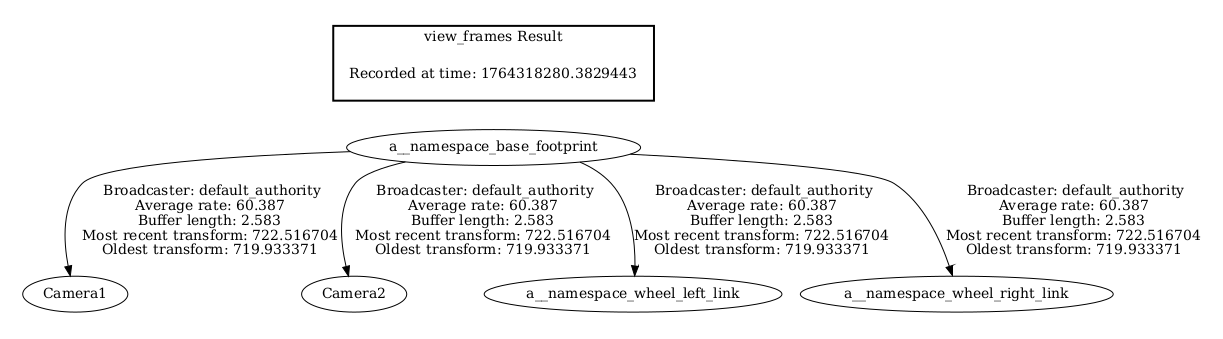
전체 graph를 연결한 뒤 Isaac Sim stage를 play하고 RViz2에서 TF display를 추가합니다. 정상적으로 publish되면 world, odom, robot base, sensor frame들이 하나의 tree로 이어져 보입니다.
전체 흐름은 아래처럼 생각하면 됩니다.
1
2
3
4
world
-> odom
-> base_link / base_footprint
-> sensors and wheel links
TF가 끊겨 있으면 RViz2에서 sensor data가 보이지 않거나, 엉뚱한 위치에 나타날 수 있습니다. 이럴 때는 fixed frame, frame ID, parent/target prim 설정을 먼저 확인합니다.
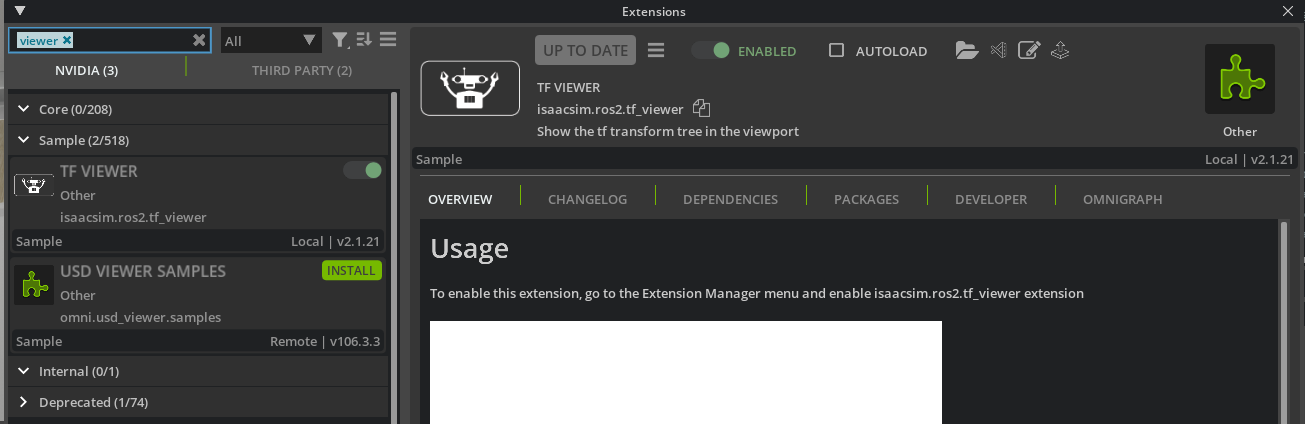
6. Isaac Sim tf_viewer 사용
Isaac Sim 안에서도 TF 구조를 확인할 수 있습니다. Window > Extensions에서 tf_viewer를 검색한 뒤 enable합니다.
RViz2와 Isaac Sim의 TF viewer를 같이 보면, graph 설정이 실제 ROS2 TF tree로 어떻게 나가는지 확인하기 쉽습니다.
7. 정리하며
이번 글의 핵심은 sensor topic을 publish하는 것에서 한 단계 더 나아가, 그 sensor들이 robot 기준으로 어디에 붙어 있는지 TF tree로 설명하는 것입니다.
1
2
3
4
robot prim / sensor prim
-> ROS2 Publish Transform Tree
-> ROS2 Publish Odometry
-> RViz2 TF and Odometry display
TF와 odometry까지 연결해두면 RViz2에서 image, lidar, robot pose를 같은 좌표계로 확인할 수 있고, 이후 navigation이나 control 예제로 확장하기 쉬워집니다. 센서 topic이 “무엇을 본다”를 담당한다면, TF는 그 data가 “어디 기준인지”를 설명합니다.