Isaac Sim Tutorial 1. TurtleBot으로 ROS2 연결하기
Isaac Sim에서 TurtleBot3 URDF를 불러오고 ROS2 /cmd_vel 메시지로 주행시키는 전체 흐름을 정리한다.
Isaac Sim에서 ROS2 연결을 처음 확인할 때 가장 작고 다루기 좋은 예제가 TurtleBot3입니다. 이 글에서는 TurtleBot3 Burger URDF를 Isaac Sim으로 가져온 뒤, ROS2 /cmd_vel topic을 받아 로봇 바퀴 joint에 속도 명령을 보내는 과정을 정리합니다.
이번 글의 목표는 단순히 TurtleBot을 움직이는 것이 아니라, ROS2 메시지가 Isaac Sim의 OmniGraph를 거쳐 articulation 제어로 이어지는 흐름을 이해하는 것입니다.
참고한 자료는 아래와 같습니다.
1. TurtleBot3 URDF 준비
먼저 ROS2가 source된 터미널에서 TurtleBot3 패키지를 받아옵니다.
1
git clone -b $ROS_DISTRO https://github.com/ROBOTIS-GIT/turtlebot3.git turtlebot3

이번 글에서 사용할 URDF는 아래 경로에 있습니다.
1
turtlebot3/turtlebot3_description/urdf/turtlebot3_burger.urdf

이미 Isaac Sim에서 움직일 수 있게 세팅된 USD 로봇이 있다면 이 단계는 생략해도 됩니다. 여기서는 ROS2 bridge와 OmniGraph 연결 흐름을 확인하는 것이 목적이므로, 공식 튜토리얼처럼 TurtleBot3 Burger를 기준으로 진행합니다.
2. Isaac Sim 환경 만들기
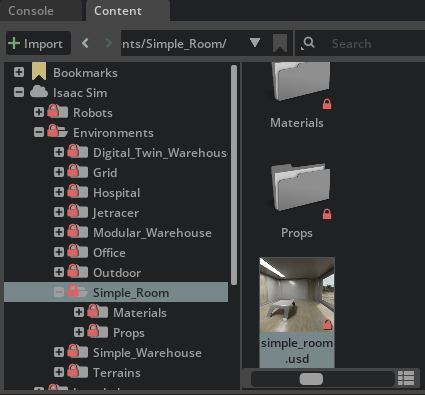
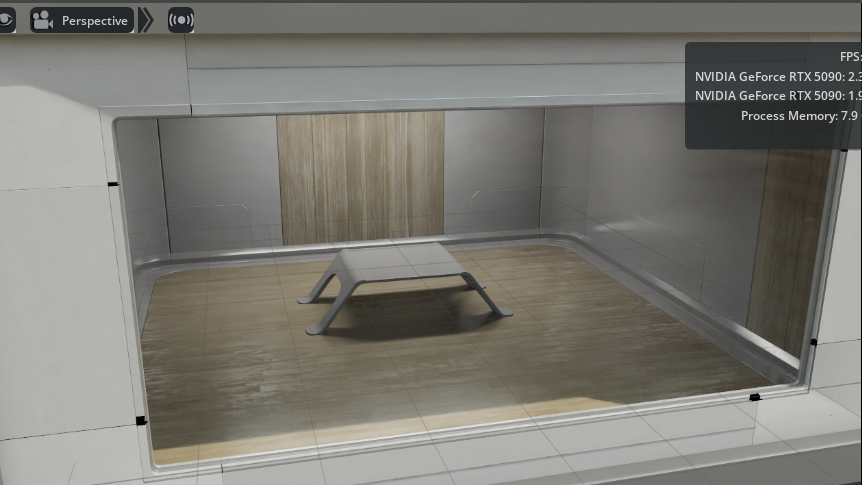
Isaac Sim의 Content Browser에서 아래 asset을 stage로 드래그합니다.
1
Isaac Sim/Environments/Simple_Room/simple_room.usd
원점 근처에 배치해두면 이후 TurtleBot 위치와 camera view를 맞추기 편합니다.
시점 조작은 우클릭을 누른 상태에서 WASD, E, Q를 사용하면 편합니다. 우클릭 상태에서 마우스 휠을 움직이면 이동 속도도 조절할 수 있습니다.
3. URDF Import 설정
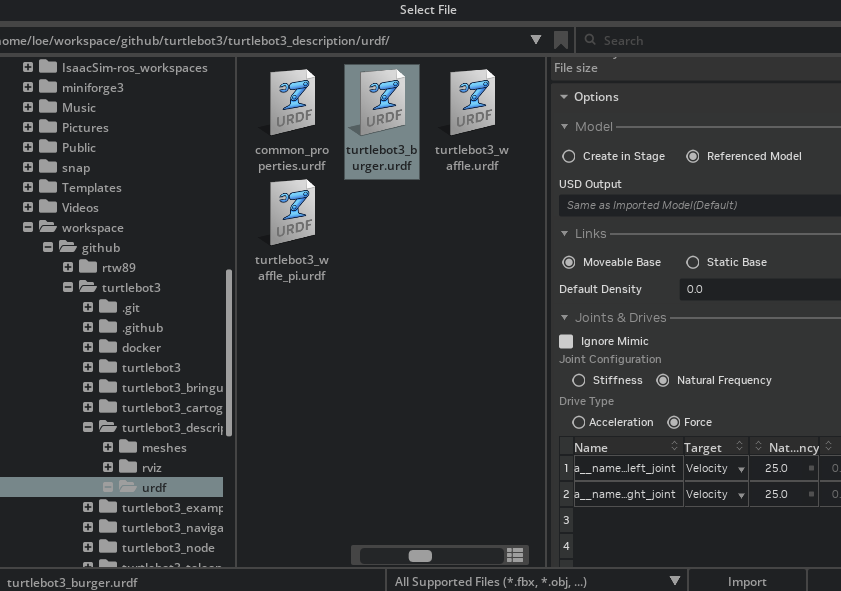
상단 메뉴에서 File > Import를 열고 turtlebot3_burger.urdf를 선택합니다. Import 옵션에서는 아래 항목을 확인합니다.
Links는Moveable Base로 설정합니다.- Joint configuration은 자연스럽게 안정화되도록 frequency 기반 설정을 사용합니다.
wheel_left_joint,wheel_right_joint의 drive target은Velocity로 둡니다.
Import가 끝나면 stage에 turtlebot3_burger prim이 생성됩니다.
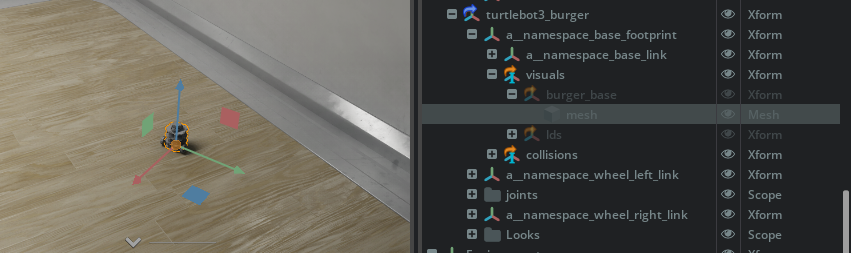
이 시점에서 중요한 것은 로봇이 stage에 보이는 것만이 아닙니다. 이후 OmniGraph에서 articulation target과 wheel joint name을 지정해야 하므로, stage tree에서 TurtleBot prim과 wheel joint 이름을 미리 확인해두면 좋습니다.
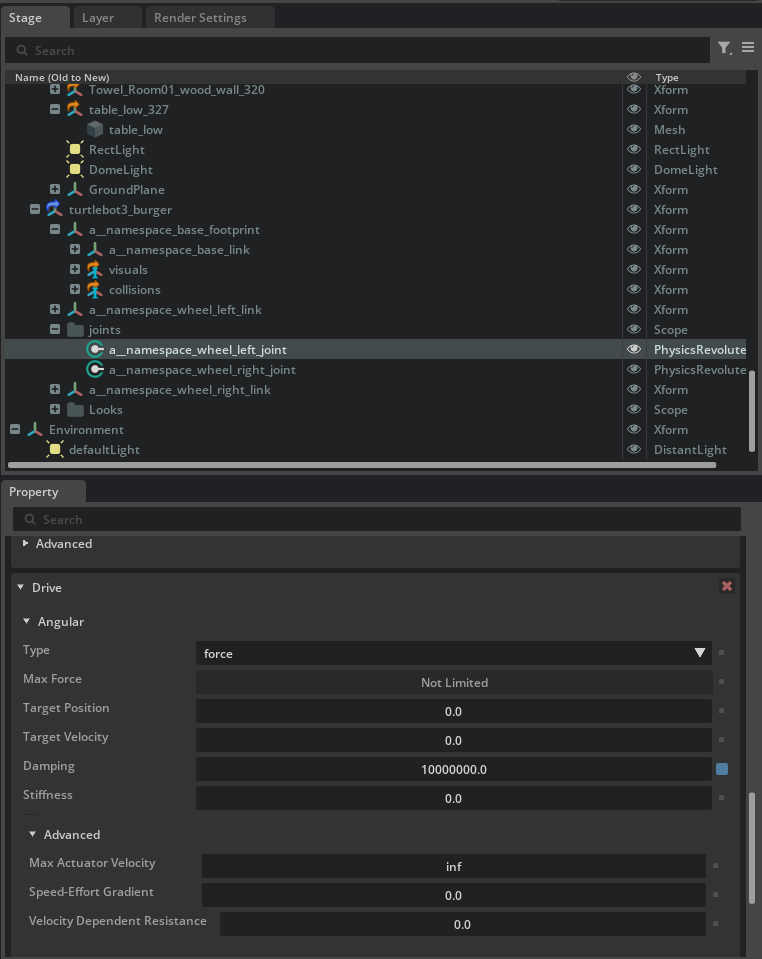
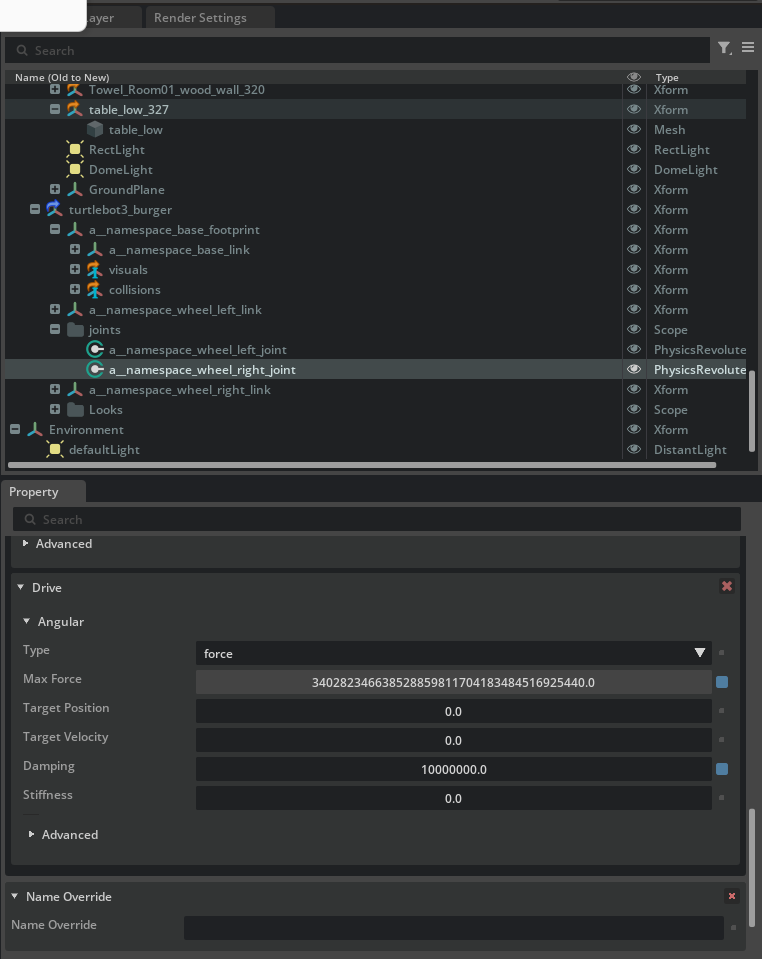
4. 바퀴 Joint 물리 설정
Import된 TurtleBot의 왼쪽, 오른쪽 바퀴 joint에서 damping 값을 크게 설정합니다. 예를 들면 10000000.0처럼 매우 큰 값을 줄 수 있습니다.
이 값은 wheel joint가 속도 명령을 빠르게 따라가도록 만드는 역할을 합니다. 시뮬레이션에서 바퀴가 미끄러지거나 반응이 느리면 이 설정을 먼저 확인하는 것이 좋습니다.
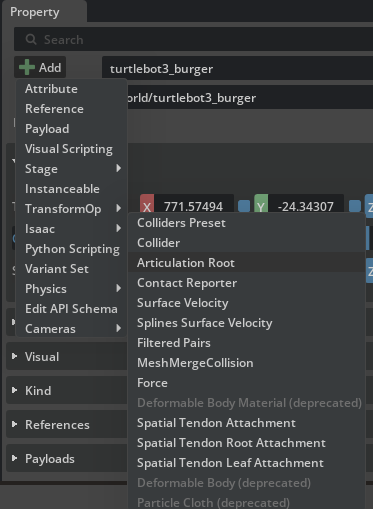
추가로 turtlebot3_burger prim에는 아래 물리 속성을 붙입니다.
Physics > Rigid BodyPhysics > MassPhysics > Articulation Root
속성 값 입력창은 Ctrl을 누른 채 클릭하면 숫자를 직접 입력하기 쉽습니다.
5. OmniGraph로 ROS2 제어 흐름 만들기
이제 /cmd_vel로 들어온 geometry_msgs/Twist 메시지를 바퀴 속도로 변환합니다. 전체 흐름은 아래처럼 잡습니다.
1
2
3
4
ROS2 Subscribe Twist
-> Scale To/From Stage Unit
-> Differential Controller
-> Articulation Controller
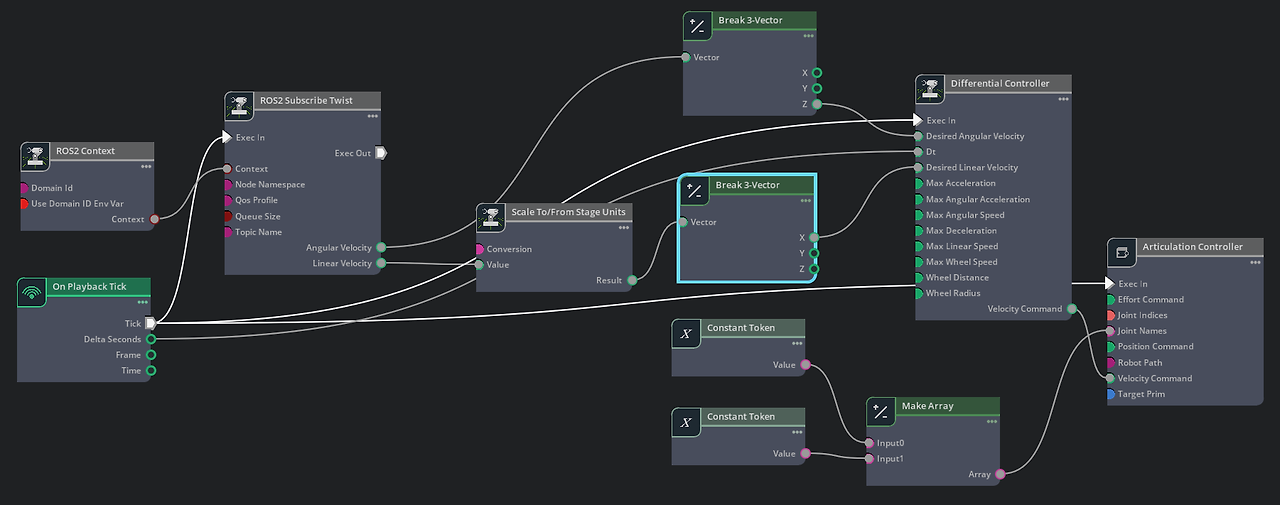
Window > Graph Editors > Action Graph에서 Action Graph를 만들고 다음 노드들을 추가합니다.
| 노드 | 역할 |
|---|---|
| On Playback Tick | 시뮬레이션이 재생 중일 때 매 tick 실행 신호를 만듭니다. |
| ROS2 Context | ROS_DOMAIN_ID를 포함한 ROS2 통신 컨텍스트를 만듭니다. 기본값은 0입니다. |
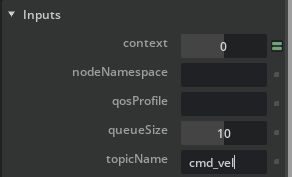
| ROS2 Subscribe Twist | /cmd_vel topic에서 Twist 메시지를 구독합니다. |
| Scale To/From Stage Unit | 입력 속도를 stage 단위에 맞게 변환합니다. |
| Differential Controller | 선속도와 각속도를 왼쪽, 오른쪽 바퀴 속도로 변환합니다. |
| Articulation Controller | 계산된 joint velocity command를 실제 articulation joint에 전달합니다. |
ROS2 Subscribe Twist 노드의 topic name은 /cmd_vel로 설정합니다.
이 graph에서 핵심은 /cmd_vel을 직접 joint에 넣는 것이 아니라, Differential Controller를 통해 differential drive robot에 맞는 양쪽 wheel velocity로 변환한다는 점입니다.
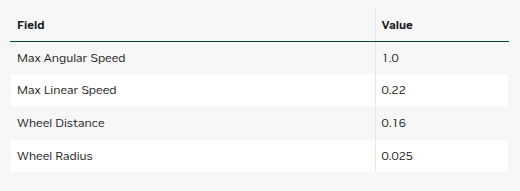
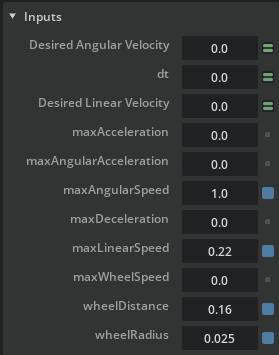
6. Differential Controller 파라미터
Differential Controller는 로봇의 목표 선속도와 각속도를 받아 양쪽 바퀴 속도로 바꿉니다. 그래서 최소한 다음 두 값이 필요합니다.
- wheel radius
- wheel distance
TurtleBot3 Burger 모델의 실제 값이나 import된 stage의 단위 설정에 맞춰 입력합니다. 값이 맞지 않으면 회전 반경이나 속도가 기대와 다르게 나옵니다.
여기서 joint token에는 실제 stage에 존재하는 wheel joint 이름을 넣어야 합니다. URDF import 과정에서 namespace가 붙었다면, 화면에 보이는 이름을 그대로 사용합니다.
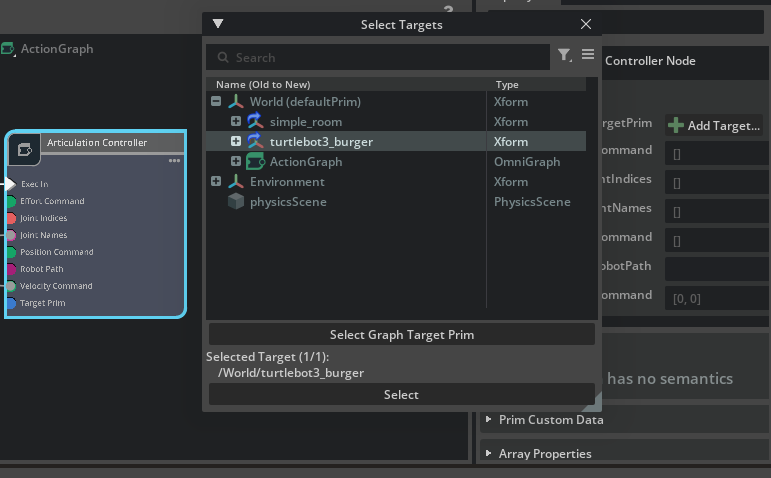
7. Articulation Controller 연결
Articulation Controller에는 제어 대상 articulation과 움직일 joint 이름을 알려줘야 합니다.
- articulation target은
turtlebot3_burger로 지정합니다. - joint name 입력에는
wheel_left_joint,wheel_right_joint를 넣습니다. - Differential Controller의 wheel velocity output을 Articulation Controller의 velocity command 쪽으로 연결합니다.
URDF import 과정에서 joint 이름에 namespace가 붙었다면 실제 stage에 보이는 joint 이름에 맞춰 수정해야 합니다. 예를 들어 a__namespace_wheel_left_joint처럼 들어온 경우에는 그 이름을 그대로 사용합니다.
정상적으로 연결되면 ROS2 topic으로 들어온 속도 명령이 Differential Controller를 거쳐 wheel joint velocity command로 들어갑니다.
8. ROS2 연결 확인
Isaac Sim에서 graph를 만들고 stage를 play한 뒤, host의 ROS2 터미널에서 topic 목록을 확인합니다.
1
ros2 topic list
OmniGraph가 정상적으로 /cmd_vel을 구독하고 있다면 topic list에 /cmd_vel이 보여야 합니다.

이후 터미널에서 Twist 메시지를 publish하면 TurtleBot이 움직입니다.
1
ros2 topic pub /cmd_vel geometry_msgs/Twist "{'linear': {'x': 0.2, 'y': 0.0, 'z': 0.0}, 'angular': {'x': 0.0, 'y': 0.0, 'z': 1.0}}"
앞으로 직진하면서 동시에 회전한다면 ROS2 bridge, /cmd_vel subscription, Differential Controller, Articulation Controller까지 연결된 것입니다.
9. 정리하며
이번 과정의 핵심은 URDF import 자체보다도 ROS2 메시지가 Isaac Sim 내부 제어 노드로 들어가는 경로를 이해하는 것입니다.
1
2
3
4
/cmd_vel
-> ROS2 Subscribe Twist
-> Differential Controller
-> wheel_left_joint, wheel_right_joint
이 구조를 이해해두면 이후 camera, lidar, odometry, TF tree를 붙일 때도 훨씬 덜 헷갈립니다. 특히 Isaac Sim의 ROS2 튜토리얼은 대부분 ROS2 Context, sensor/helper node, target prim 지정이라는 패턴을 반복하므로, 여기서 graph 흐름을 익혀두는 것이 중요합니다.