Isaac Sim Tutorial 3. RTX Lidar Sensors
Isaac Sim에서 TurtleBot에 RTX 2D/3D Lidar를 붙이고 ROS2 LaserScan, PointCloud topic으로 publish하는 흐름을 정리한다.
이 글은 TurtleBot ROS2 연결과 ROS2 Cameras에 이어서, TurtleBot에 RTX Lidar sensor를 붙이고 ROS2 topic으로 내보내는 과정을 정리합니다.
이번 목표는 2D RTX Lidar는 LaserScan, 3D RTX Lidar는 PointCloud로 publish하고 RViz2에서 확인하는 것입니다. 카메라 글과 마찬가지로 핵심은 sensor prim을 render product로 만들고, ROS2 helper가 topic으로 변환하는 흐름입니다.
참고한 자료는 아래와 같습니다.
1. RTX 2D Lidar 추가
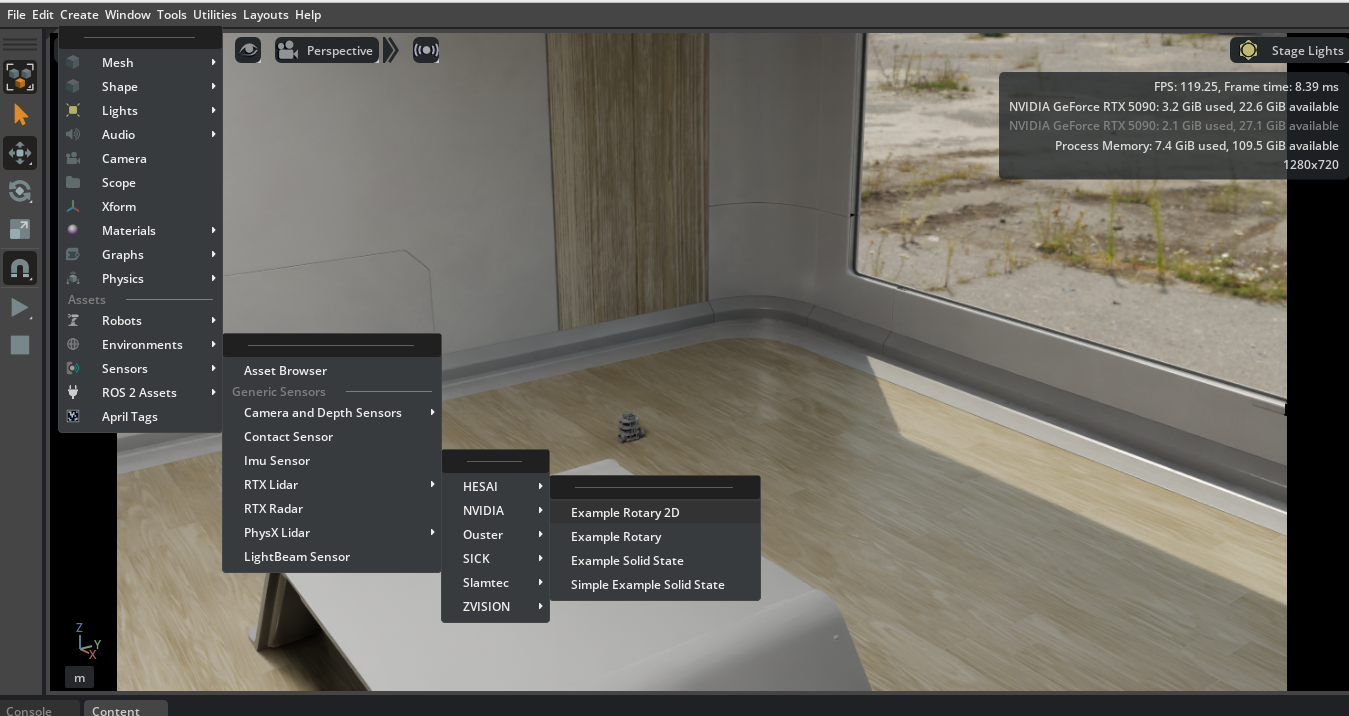
먼저 상단 메뉴에서 RTX 2D Lidar sensor를 추가합니다.
1
Create > Sensors > RTX Lidar > NVIDIA > Example Rotary 2D
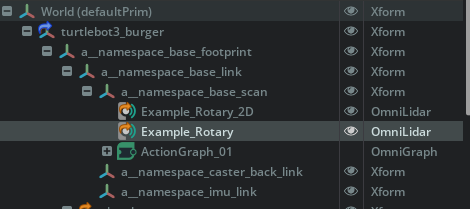
추가한 2D Lidar는 TurtleBot의 lidar 위치에 맞춰 배치합니다. TurtleBot URDF에서 lidar 기준 prim이 base_scan이라면, Lidar prim을 base_scan 아래에 넣는 방식이 자연스럽습니다.
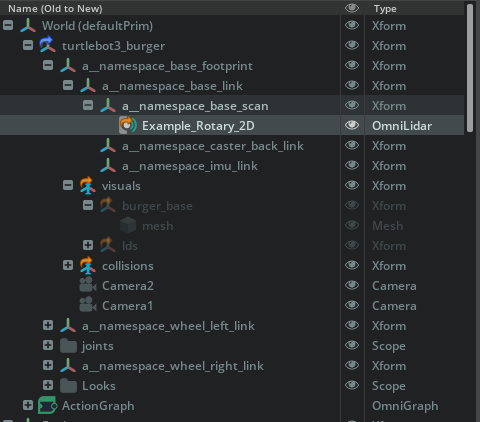
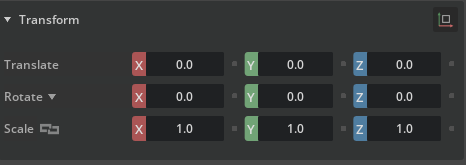
Lidar prim이 base_scan 아래에 들어갔다면 local transform은 모두 0으로 맞춥니다. 이렇게 두면 base_scan이 lidar의 기준 frame 역할을 합니다.
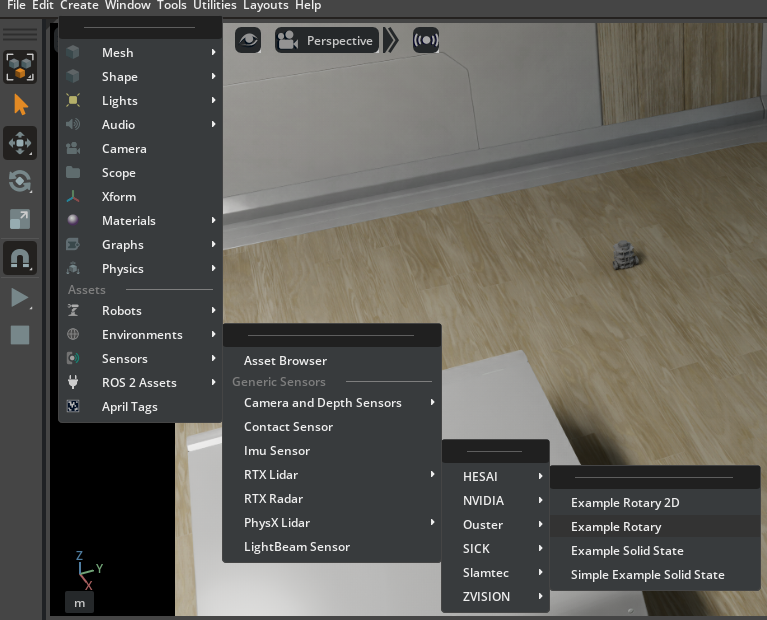
2. RTX 3D Lidar 추가
3D Lidar도 같은 방식으로 추가합니다. 2D Lidar가 평면 scan을 다룬다면, 3D Lidar는 point cloud 확인용으로 사용합니다.
3D Lidar도 TurtleBot의 lidar frame 기준으로 배치합니다. frame 이름을 2D Lidar와 맞춰 쓰면 RViz2에서 TF와 data display를 맞추기 쉽습니다.
3. RTX Lidar Action Graph 만들기
이제 Lidar sensor 출력을 ROS2 topic으로 publish하는 Action Graph를 만듭니다.
Window > Graph Editors > Action Graph에서 graph를 만들고, graph prim을 lidar의 namespace_base_scan 아래에 넣습니다. 이렇게 하면 multi-robot 상황에서 namespace가 자동으로 붙어 topic과 frame 충돌을 줄일 수 있습니다.
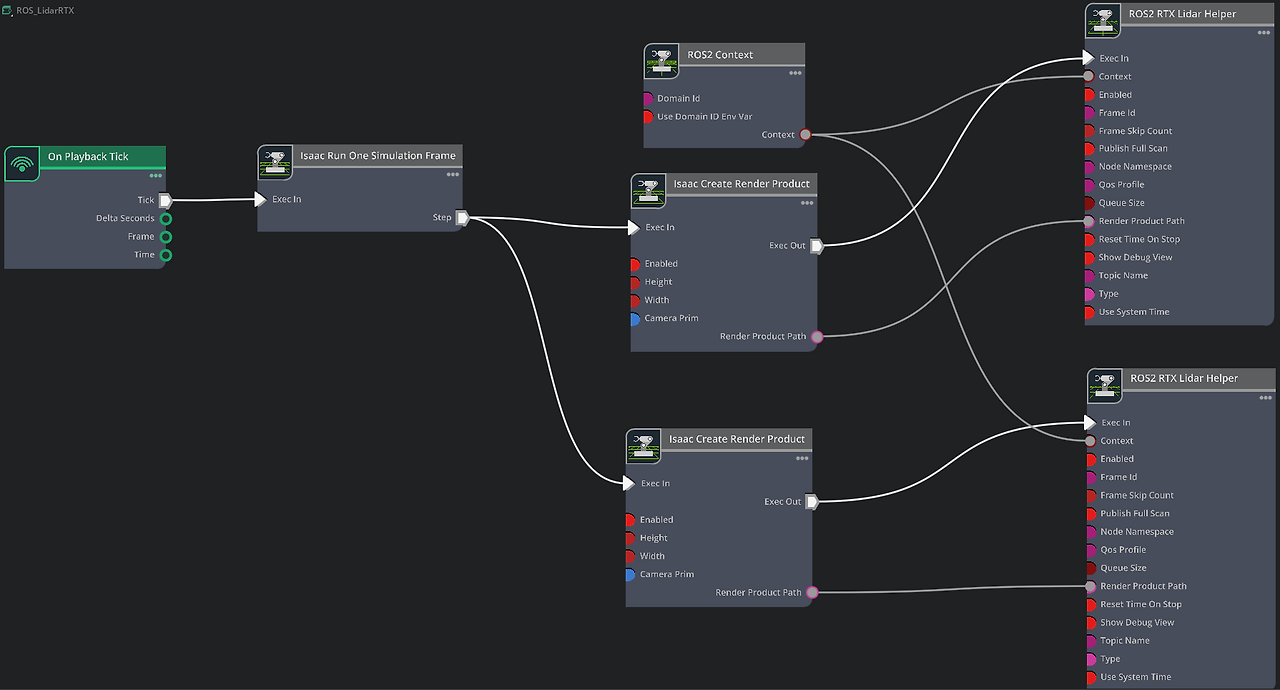
핵심 노드는 다음과 같습니다.
| 노드 | 역할 |
|---|---|
| On Playback Tick | simulation play 중 graph를 tick마다 실행합니다. |
| ROS2 Context | ROS2 통신 context를 만듭니다. |
| Isaac Create Render Product | RTX Lidar sensor를 render product로 연결합니다. |
| ROS2 RTX Lidar Helper | Lidar render product를 ROS2 LaserScan 또는 PointCloud topic으로 publish합니다. |
2D Lidar와 3D Lidar는 각각 별도의 Isaac Create Render Product와 ROS2 RTX Lidar Helper에 연결합니다. 카메라 때와 거의 같은 구조이지만, helper node가 camera helper가 아니라 RTX Lidar helper로 바뀐다는 점이 다릅니다.
4. Topic과 Frame 설정
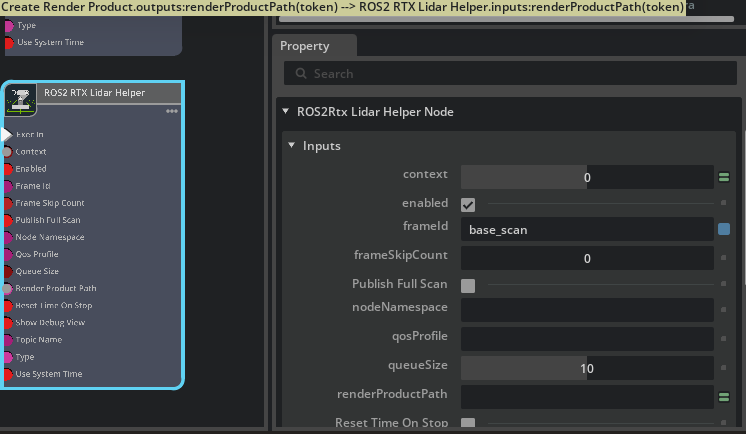
ROS2 RTX Lidar Helper에서 publish할 message type과 topic name을 정합니다.
- 2D Lidar:
LaserScan, topic name은scans - 3D Lidar:
PointCloud, topic name은points - frame ID:
base_scan
둘 다 frame ID를 base_scan으로 맞추면 RViz2에서 scan과 point cloud를 로봇 frame 기준으로 보기 편합니다.
topic 이름은 프로젝트 convention에 맞게 바꿔도 됩니다. 다만 이후 TF tree와 RViz2 display를 연결할 때 헷갈리지 않도록 sensor별 topic과 frame ID를 명확히 구분해두는 것이 좋습니다.
5. RViz2에서 확인
Isaac Sim stage를 play한 뒤 host 터미널에서 ROS2 topic을 확인합니다.
1
ros2 topic list
정상적으로 연결되면 scans, points topic이 보입니다. RViz2에서는 2D Lidar는 LaserScan, 3D Lidar는 PointCloud2 display로 확인합니다.
RViz2에서 data가 보이지 않는다면 topic name, message type, fixed frame, frame ID를 순서대로 확인합니다. Lidar data는 publish되고 있는데 frame이 맞지 않아서 화면에 안 보이는 경우도 자주 생깁니다.
6. 정리하며
RTX Lidar graph의 핵심 흐름은 camera graph와 비슷합니다.
1
2
3
4
RTX Lidar prim
-> Isaac Create Render Product
-> ROS2 RTX Lidar Helper
-> LaserScan / PointCloud topic
카메라와 Lidar까지 ROS2 topic으로 연결해두면, 이후 TF tree와 odometry를 붙여 RViz2에서 로봇 전체 센서 구성을 확인할 수 있습니다. 즉, 이제 필요한 것은 sensor data 자체뿐 아니라 그 data가 어느 frame 기준인지 설명해주는 TF입니다.